For more project information check out the wiki
This Self Balancing Robot project is for the Rutgers University Governor School Course "How to Make a Self Balancing Robot" started by Aatish in 2012. He had the self balancing robot using the Sparkfun box. In addition Jason Doreweller, http://www.jddorweiler.appspot.com/electronics.html#robot, created a Self Balancing Robot at Fubar Labs in 2012. Concepts from that robot where tested, and modeled developing this new robot.
This project has added:
- servo calibration sketches
- data gathering sketches and test for the accelermeter
- data gathering sketches and test for the gyro
- A servo movement library
- PID, Kalman fileter library
Arduino libraries used in the project:
- Servo
- ITG3200
- ADXL445
- Serial
BOM:
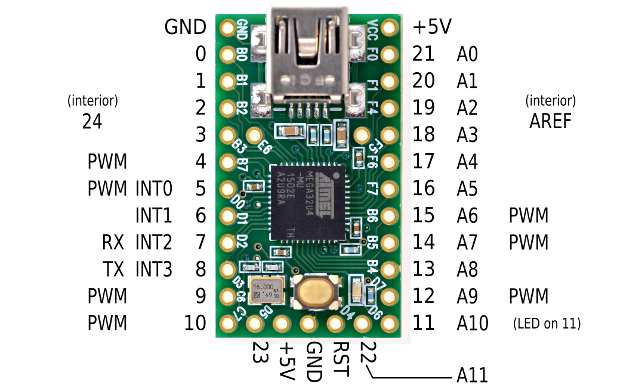
- Teensy 2.0
- 2 Parallax Continuous Servos
- 5v Switching voltage regulator
- Sparkfun 9 DOF freedom IMO
Note: Using the Teensy eliminated the Serial vs Servo timer problem.
Laser cut reference design for a body to mount the project.
{kind=link}