Just a bit of fun with robots

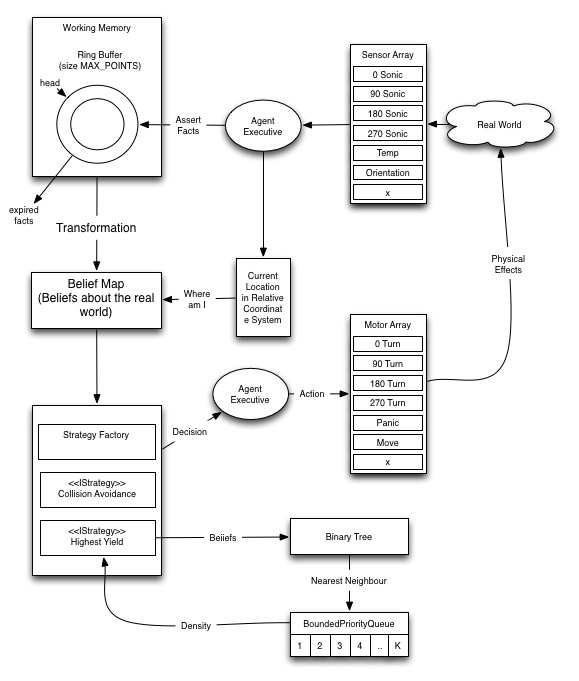
The Automous Agent Executive (The Brain) was build with the objective of allowing the robot to move freely; learn it's environment and make decisions based on pluggable strategies. The agent builds a belief map that contains data about it's environment. Then it employs a strategy to find the highest yielding next best action. Upon taking this action sensors re-feedback data about the environment that influence the next roudn of decision making.
Based on diagrams from Peter Norvigs book - Artificial Intelligence: A Modern Approach (https://en.wikipedia.org/wiki/Artificial_Intelligence:_A_Modern_Approach)
![Agent Orient Software] (https://raw.githubusercontent.com/rsiwicki/ecobot/master/images/eco_brain.jpg)
{kind=link}
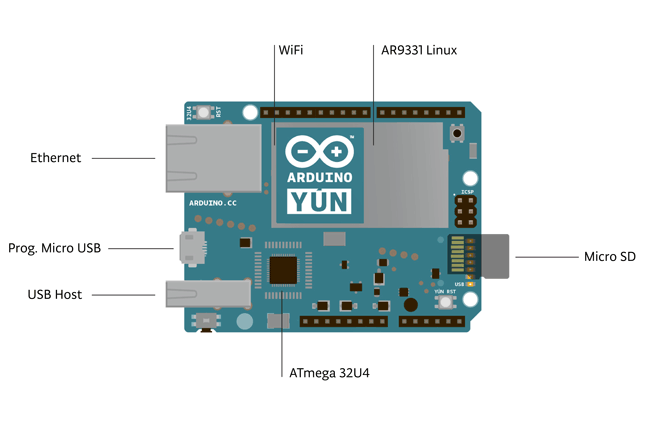
It will run on board like this
![Yun] (https://www.arduino.cc/en/uploads/Main/A000008_featured.jpg)
{kind=link}
![Yun] (https://www.arduino.cc/en/uploads/Guide/YunParts.png)
{kind=link}
These are the base files for ecobot.
To build just run
git clone https://github.com/neuralnet/ecobot.git
make
Run the diagnostic with
./Agent
To run in the Arduino go to the Thresholds.h file and change the ARDUINO define to 1. Changing this setting will ensure that the compiler does not include code that the compile does not include superflous code such as the test diagnostic and data types are correct.
The MAXPOINTS define in Thresholds.h controls the number of data points that the ecobot will retain in working memory. It is planned that when this threshold is reached the ecobot runs a KNN algorithm over the data points in working memory to create a sparse representation of the its world. This is not yet implemenented. The KNN code is in KTree.cpp.
Currently the ecobot supports two strategies for navigating its world. The first is the COLLISION AVOIDANCE strategy. When using this strategy ecobot will attempt to detect an obstacle and any impending collision. The collision threshold is stored in Thresholds.h and is assumed to be in centimetres. The distance ecobot moves for each iteration is controlled by the STRIDE define, also in Thresholds.h. Ideally STRIDE should be smaller than the collision threshold.
The second strategy is the HIGHEST YIELD strategy. The highest yield strategy will apply a KNN like strategy to determine areas that have the highest interest or yield. Currently the yield is fixed to an area that ecobot has not visited before but could use any sensor reading such as temperature.
TODO
Need to change the belief map storage to a KDTree. Instead of building a list or a separate KTree integrating the two will save memory and allow for the O(log N) generation of KNN instead of a niave O (N*N) implementation..
-
-
-
-
-
-
-
-
-
- 1 - - - - - - - - - - - - - - ^ - - - - - - - - - - - - - - 1 - - - - - - - - - -
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
- 1 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1 - - - - - - - - - -
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
- 1 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1 - - - - - - - - - -
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
- 1 - - - - - - - - - - - - - - 0 - - - - - - - - - - - - - - 1 - - - - - - - - - -
-
-
-
-
-
-
-
-