{kind=link}
A particle filter for x, y coordinates without control input. The main file is src/particle_filter.c. Compile with make in folder src/ and run with make run. The visualization is done on-the-fly with gnuplot. The particle filter uses the following parameters:
- Prior: P(X0) ~ N(0, mu=Inf) (uniformly distributed)
- Transition Model: P(Xt | x_t-1) ~ N(mu=xt-1, sigma2), where sigma2 is currently the process noise only (currently set to sigma2 = 1600)
- Sensor Model: p(zt | Xt) ~ N(mu=Xt, sigma2), sigma2x= 21566, sigma2y= 60369
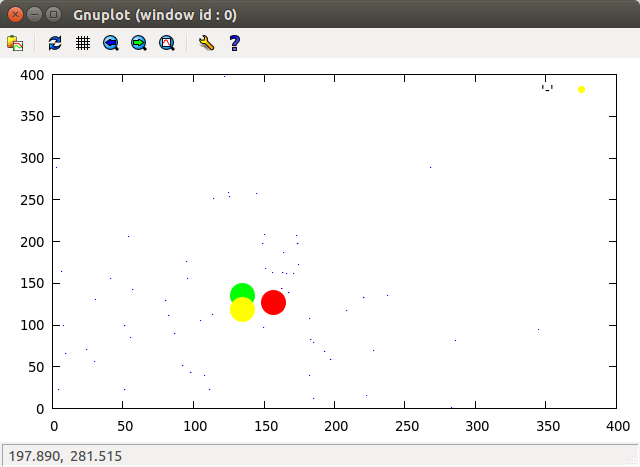
- Red: Measurement (output from treXton)
- Green: Ground truth
- Blue: Particles (size represents their weight)
- Yellow: Best estimate from particle filter (weighted average)