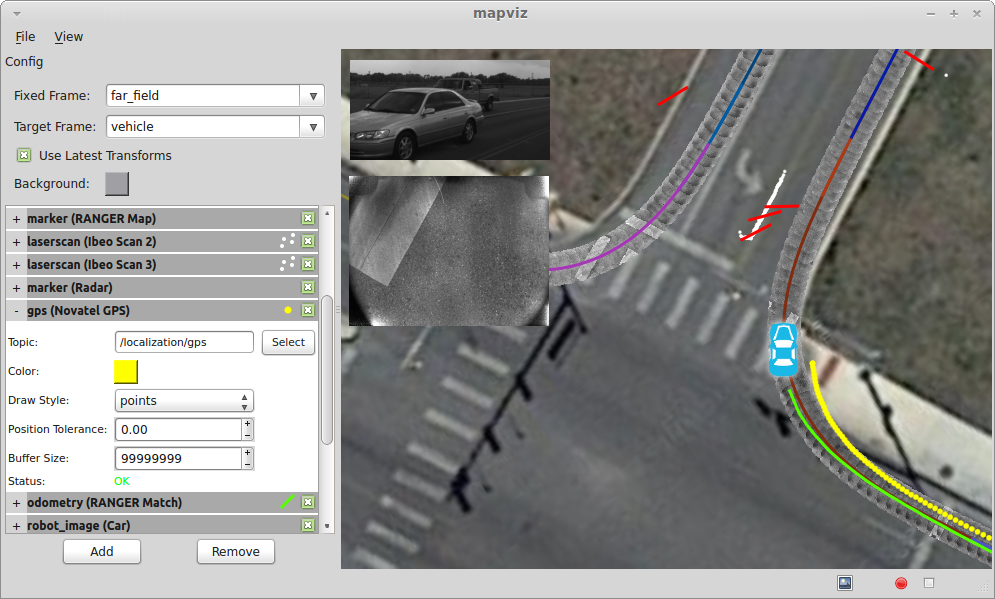
Mapviz is a ROS based visualization tool with a plug-in system similar to RVIZ focused on visualizing 2D data.
In ROS Indigo, you can install mapviz using apt-get from the ROS apt repository. This is the recommended installation method for ROS Indigo and Jade.
sudo apt-get install ros-$ROS_DISTRO-mapviz ros-$ROS_DISTRO-mapviz-plugins
| Package | Indigo (Trusty) | Jade (Trusty) | Jade (Utopic) | Jade (Vivid) |
|---|---|---|---|---|
| mapviz (32-bit) | ||||
| mapviz (64-bit) | ||||
| mapviz_plugins (32-bit) | ||||
| mapviz_plugins (64-bit) | ||||
| multires_image (32-bit) | ||||
| multires_image (64-bit) | ||||
| tile_map (32-bit) | ||||
| tile_map (64-bit) |
| Indigo | Jade |
|---|---|
 |
 |
These directions assume you have already set up a catkin workspace. See this tutorial on the ROS Wiki for help setting up a catkin workspace.
If you're using wstool, add these repositories to your wstool workspace:
wstool set mapviz --git https://github.com/swri-robotics/mapviz.git -v $ROS_DISTRO-devel
wstool set marti_common --git https://github.com/swri-robotics/marti_common.git -v $ROS_DISTRO-devel
wstool set marti_messages --git https://github.com/swri-robotics/marti_messages.git -v indigo-devel
If you're not using wstool, you can check out the repositories directly with git:
git clone https://github.com/swri-robotics/mapviz.git --branch $ROS_DISTRO-devel
git clone https://github.com/swri-robotics/marti_common.git --branch $ROS_DISTRO-devel
git clone https://github.com/swri-robotics/marti_messages.git --branch indigo-devel
Install all of the dependencies using rosdep by running the following command from the root of your catkin workspace:
rosdep install --from-paths src --ignore-src
Build the workspace with catkin_make:
catkin_make
These directions assume you have already set up a catkin workspace. See this tutorial on the ROS Wiki for help setting up a catkin workspace.
If you're using wstool, add these repositories to your wstool workspace:
wstool set mapviz --git https://github.com/swri-robotics/mapviz.git -v $ROS_DISTRO-devel
wstool set marti_common --git https://github.com/swri-robotics/marti_common.git -v $ROS_DISTRO-devel
wstool set marti_messages --git https://github.com/swri-robotics/marti_messages.git -v $ROS_DISTRO-devel
If you're not using wstool, you can check out the repositories with git:
git clone https://github.com/swri-robotics/mapviz.git --branch $ROS_DISTRO-devel
git clone https://github.com/swri-robotics/marti_common.git --branch $ROS_DISTRO-devel
git clone https://github.com/swri-robotics/marti_messages.git --branch $ROS_DISTRO-devel
Install all of the dependencies manually using these two commands:
sudo apt-get install ros-$ROS_DISTRO-tf ros-$ROS_DISTRO-common-msgs ros-$ROS_DISTRO-plugin-lib \
ros-$ROS_DISTRO-gps-umd ros-$ROS_DISTRO-nodelet ros-$ROS_DISTRO-cv-bridge \
ros-$ROS_DISTRO-image-geometry ros-$ROS_DISTRO-angles ros-$ROS_DISTRO-camera-calibration-parsers \
ros-$ROS_DISTRO-image-transport
sudo apt-get install yaml-cpp libboost-random-dev libblas-dev liblapack-dev libproj-dev \
libglew-dev freeglut3-dev libxmu-dev libgeos++-dev qt4-dev-tools
Build the workspace with catkin_make:
catkin_make
Overlays a sensor_msgs::DisparityImage onto the display using the ''jet'' color map.
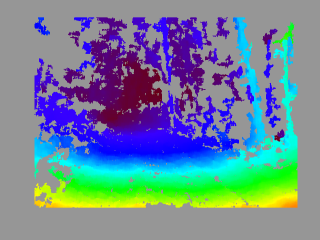
Parameters
- Topic: The disparity topic name
- Anchor: (top left | top center | top right | center left | center | center right | bottom left | bottom center | bottom right)
- Offset X: Display offset from the left
- Offset Y: Display offset from the top
- Width: Display width
- Height: Display height
- Units: (pixels | percent of window)
Projects gps_common::GPSFix message data into the scene.
Parameters
- Topic: The GPS topic
- Color: The color of the GPS data
- Draw Style: (lines | points | arrows)
- Position Tolerance: Distance threshold for adding new GPS points to visualization
- Buffer Size: Size of circular buffer of GPS points
Projects a 2D grid into the scene.
Parameters
- Frame: Coordinate frame of the grid
- Color: Color of the grid
- Alpha: Alpha transparency of the grid
- X: X offset of the grid from the specified coordinate frame origin
- Y: Y offset of the grid from the specified coordinate frame origin
- Size: Size of each grid cell
- Rows: Number of grid rows
- Columns: Number of grid columns
Overlays a sensor_msgs::Image onto the display.
Parameters
- Topic: The image topic name
- Anchor: (top left | top center | top right | center left | center | center right | bottom left | bottom center | bottom right)
- Offset X: Display offset from the left
- Offset Y: Display offset from the top
- Width: Display width
- Height: Display height
- Units: (pixels | percent of window)
Projects a sensor_msgs::LaserScan message into the scene.
- Topic: The laser scan topic name
- Min Color: The color associated with minimum return intensity
- Max Color: The color associated with maximum return intensity
- Min Intesity: Minimum intensity value
- Max Intensity: Maximum intensity value
- Point Size: Display size of laser scan points in pixels
- Buffer Size: Size of circular buffer of laser scan messages points
Projects a visualization_msgs::Marker or visualization_msgs::MarkerArray into the scene.
Markers are the most flexible display type and more or less mirror the OpenGL primitives.
Parameters
- Topic: The marker topic
Projects a geo-referenced multi-resolution image tile map into the scene. The concept is the same as the Google Maps style pan/zoom satellite imagery.
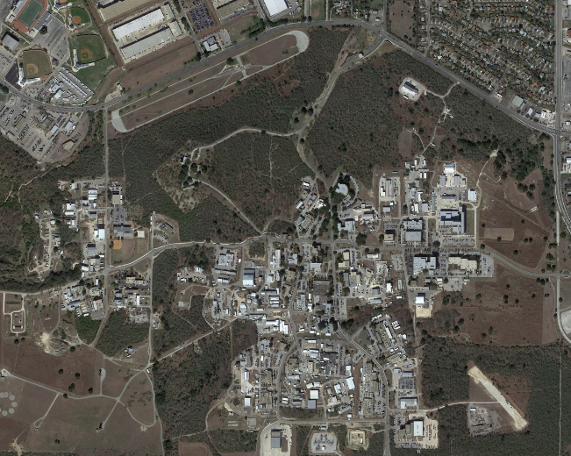
Parameters
- Geo File: Path to the geo-referenced map tiles.
A custom format is currently used to store the map tiles and geo-reference. The geo-file has the following format:
image_path: "." # The relative path to the map tiles
image_width: 29184 # The full pixel width of the map
image_height: 15872 # The full pixel height of the map
tile_size: 512 # The pixel size of the individual tiles
datum: "wgs84" # Datum is currently ignored
projection: "utm" # (utm|wgs84)
# At least 2 tie points are required for
# scale, and 3 for orientation.
tiepoints: # [pixel x, pixel y, geo x, geo y]
- point: [4799, 209, 535674.5, 3258382.5]
- point: [2336, 15596, 535329.5, 3256198.5]
- point: [26925, 15457, 538837.5, 3256233.5]
- point: [29133, 84, 539142.5, 3258416.5]
The map tiles are stored in directories for each resolution starting with layer0, the full resolution. In subsequent layers the resolution is halved until the entire map fits within a single tile.
Tiles are named using the following format:
tile%05dx%05d.png % (row, column)
Projects nav_msgs::Odometry message data into the scene.
Parameters
- Topic: The odometry topic
- Color: The color of the odometry data
- Draw Style: (lines | points | arrows)
- Show Covariance: Draw covariance ellipse around latest data
- Position Tolerance: Distance threshold for adding new odometry points to visualization
- Buffer Size: Size of circular buffer of odometry points
Projects nav_msgs::Path message data into the scene.
Parameters
- Topic: The path topic
Publishes a geometry_msgs::PointStamped message every time a user clicks on the map frame that corresponds to the clicked location.
Parameters
- Topic: The topic to publish the point to
- Frame: The target frame to transform the point to before publishing it
Projects an image loaded from file into the scene to represent the robot platform.
Parameters
- Image File: Path to the image file
- Frame: Frame to tie the image to
- Width: The physical width represented by the image
- Height: The physical height represented by the image
Displays the most recent string from a std_msgs::String message at a fixed location on the scene.
Parameters
- Topic: The string topic
- Font: The font for rendering the string
- Color: The color for drawing the string
- Anchor: (top left | top center | top right | center left | center | center right | bottom left | bottom center | bottom right)
- Offset X: Horizontal offset from the anchor
- Offset Y: Vertical offset from the anchor
- Units: (pixels | percent of window)
Projects marti_visualization_msgs::TexturedMarker and marti_visualization_msgs::TexturedMarkerArray message data into the scene.
Textured markers follow the same general approach as traditional markers, but can be used to texture dense image data onto a quad which is projected into the scene.
Parameters
- Topic: The textured marker topic
Projects a geo-referenced multi-resolution image tile map into the scene. Map tiles can be obtained from Bing Maps or any WMTS Tile Service. Pre-defined services that access Stamen Design (terrain, watercolor, and toner) are provided. Custom or local WMTS map servers can also be specified. Map data is cached to disk which enables some limited use completely offline.




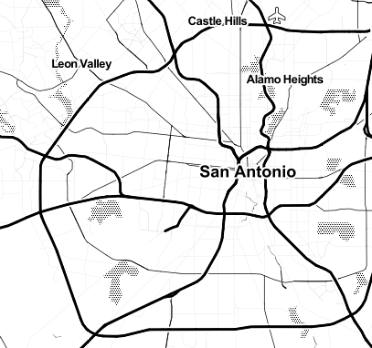
Parameters
- Source: The name of source of the tile data.
- Base URL: A template URL used to obtain map tiles. When obtaining map tiles, parameters labeled
{level},{x}, and{y}in the URL will be replaced with appropriate values. For example,http://tile.stamen.com/terrain/{level}/{x}/{y}.pngis appropriate for retrieving terrain tiles from Stamen Design. - API Key: When the
Bing Maps (terrain)source is selected, you must enter a Bing Maps access key here and click theSavebutton in order for tiles to be available. You can get a Bing Maps Key from the Microsoft Developer Network. - Max Zoom: The maximum zoom level that will be used when requesting tiles.
Projects Tf data into the scene similar to the Odometry plug-in.
Parameters
- Frame: The Tf frame
- Color: The color of the Tf data
- Draw Style: (lines | points | arrows)
- Position Tolerance: Distance threshold for adding new Tf points to visualization
- Buffer Size: Size of circular buffer of Tf points